Table of Contents
Logbook
This is your logbook. Insert here all relevant information regarding the evolution of your project
Weekly Report
1st Week Report During the first week our team was doing a lot of research to get familiar with the matter. In our meetings we were brainstorming about different solutions to being our robot into action. We were also figuring out what kind of material we should use, in case we should also consider the design. The material has to be a very light one and quite cheap at the same time because our budget is limited. Our team prepared an agenda with a few questions which we are going to present to our supervisors.
2nd Week Report After receiving all the documentation the teacher gave us, we started to study the different existing solutions and comparing them. Also we searched the internet for more inspiration and studied the biological creatures who could be a basis for the wanted movements. Furthermore we compared the mechanisms of the existing models, and explored our options (for example the type of power supply). In the different models we saw that the hummingbird model or the dragonfly robot were the most interesting. So we listed the pro's and con's of these two. After we decided to make a list of questions so we can make an informed decision.
3rd Week Report
- Reading the documents which we received from Manuel.
- Research about Components of remote controlled toys, e.g. batteries, engines, techniques to make the wings move properly.
- Making tables of components.
- Starting with the marketing Analysis.
4th Week Report
- Studying some pages out of the books that we received from Manuel.
- Working on the State of the arts.
- Making a final decision of the animal that we take: DOVE.
- Preparing the material list.
- Working on the Marketing part.
5th Week Report
- Finished the Marketing plan.
- Making sketches to present it in the next meeting .
- Preparing the Gantt chart.
- Preparing the leaflet.
- Working on sustainability and ethics.
- Searching for bigger engines.
- Decided on the Remote Control but not on the wings, probably we are trying out two kinds if the budget is enough.
6th Week Report
- Uploading the Gantt chart.
- Doing the last parts of Ethics and finishing it.
- Writing the introduction.
- Making frontpage and leaflet in photoshop.
- Finishing Sustainability and eco-efficiency.
- Putting everything together for interim assessment in pdf, and uploading it.
7th Week Report
- Interim presentation.
- Rehearsing for it.
8th Week Report
- Couple of meetings with Fernando during Easter.
- Updating Product Development(Introduction, components)
- Finishing 3 first topics of Project Management.
- Working on 3D model in SolidWorks.
- Last version of Material list uploaded.
9th Week Report
- Finshing topics 4-6 of Project Management
- Working on 3D model in SolidWorks and making 2D drawings
- Making a list of tools needed in the workshop.
10th Week Report
- Finshing topics 7-9 of Project Management
- Presentation in Ethics and Deontology
- Making a foam prototype of the body
- Fixing the references and improving Project Development
- Working in Solidworks
11th Week Report
- Meeting with Ana, to get feedback from our Interim Assessment
- Visiting the Aerokit store in Espinho, in order to find materials
- Improving Project Development
- Finishing the Project Management section and sending it to the lecturer
- Making pictures and video clips for the video
12th Week report
- Making the electrical drawings for the Project Development
- Making the presentation for the Project Management class
- Finding local companies that could order our materials to Portugal
- Making pictures and video clips for the video
13th Week report
- Finding local companies that could order our materials to Portugal
- Project Management presentation
- Correcting the language for the Final report
- Putting everything together for the Final Report
- Making pictures and video clips for the video
14th Week report
- All the materials arrived except the engine, that is out of stock
- Composing the final presentation and rehearsing for it
- Making the video
- Building the prototype in workshop
15th Week report
- Building the prototype in workshop
- Making the user manual
Meetings
1st Meeting (2014-02-27)
Agenda:
- Presentation
- Modus operandi
- Project proposals
- Electronic Logbook
Minute: As the topics were presented to us, we got all set up in groups and afterwards we were supposed to choose one of the topics. We had short discussions with the teachers after the proposals, which made the decision easier to us
2nd Meeting (2014-03-06)
Agenda:
- Does it have to get down slowly, or is it ok if it crashes?
- Should it be remote-controlled? How to do the programming?
- Where do we get the material from? And can we get used material somewhere? Do we get some materials from the isep?
- If we already chose the material, is it still possible to change it/ expand it?
- Should it have a design?
- Should the speed of going up be different oft the one to go down?
- Is there a material that leaves the air through when the wing goes up and closes when it goes down?
- Are we allowed to use the 3D printer?
- What kind of programs do we need besides Solid Works?
- Is it allowed to add a propeller for the balance?
- Does it have to go up from the ground or are we allowed to throw it in the air?
Minute:
- Find out existing flying features and compare them. Put the results into a table which contains headings such as features, shape etc. in the columns
- Make a market analysis and descripe existing approaches ( e.g. IEEE explore, Wiki report page…)
- Adapt the state of art, features, names of the Systems, autonomous or non-autonomous etc., the conclusion is a table with comparisons
- The flying robot needs a design, best material would be the polystyrene. Make it as veridical as possible
3rd Meeting (2014-03-13)
Agenda:
- Can we continue a previous unfinished project, or do we have to come up with an entirely new concept?
- Do you recommend a monoplane or a biplane?
- Should the wings flap in a specific animal-like way, or is a flapping movement sufficient?
- Does it have to be to scale?
Minute:
- We got some information and links where we could purchase our material:
- inmotion.pt
- sparkfun.com
- mouser.com
- For the wings we should not use Carbon or the sailing material, because this is too heavy
- We could ask pires de lima sail to put our wings into shape so that you can get the most out of it
- If we will use a controller we can find them in radio-controlled Airplane stores
4th Meeting (2014-03-20)
Agenda:
- What do we need to control the idle speed of the engine?
- If we MAV is without a battery, the supply will come from the remote?
- Can the remote be off the shelf or do we have to build it also?
Electronics: Motor (Power? Voltage?); Remote ; Controller between the motor and the remote? ; Wire
Body: Styrofoam
Wings: Mylar ; Leading edges/wing spurs (wood or carbon/circular or square cross section); Hinges ;
Fuselage: Carbon/wood tubes
Driving mechanism: Gearbox (Gear ratio?); Connection rods (moves the wing spurs, plastic?)
Minute:
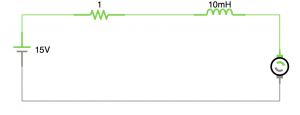
In that meeting we got a recommendation to use Pulse-width modulation (PWM) to control the speed of a DC Motor. PWM is a modulation technique that conforms the pulse duration, based on modulator signal information. Its main use is to allow the control of the power supplied to electrical devices, especially to inertial loads such as motors. The average value of voltage (and current) fed to the load is controlled by turning the switch between supply and load on and off at a fast pace. The longer the switch is on compared to the off periods, the higher the power supplied to the load is.
 T ≅ k*i(a), w ≅ k*v(a)
T ≅ k*i(a), w ≅ k*v(a)

- Read the Datasheet of a DC Motor
- Compare Batteries on the market (weight, autonomy…)
- What kind of sensors do we need
Communication System
- Wireless
- 2 Way / 1 Way
- Speed?
- Messages?
- Technology
- Infra Red
- Bluetooth
- Wifi
- Zig Bee
- Radio Frequency
5th Meeting (2014-03-28)
Agenda:
- What options are available for shaping foam shell (apart from sand paper)
- tilling machine
- glowthread
- What is the exact type of foam we need? Maquettefoam, HD300, Polysterene SLA/SLX
- Are the gears maybe too small to let it print with the 3D printer
- register for using the lab?
- special times? When can we start?
- Do we have to buy the components on our own or will they be delivered?
Minute
- Wings have to have a special shape
- create sketches
- Find gears - res catalogue, rs amida, http://es.rs-online.com/web/
6th Meeting (2014-04-03)
Agenda:
- wiki does not work properly - deleting while editing
- Will you still provide us with an engine?
- Can we add enough material to the list, in order to build both wing versions: monoplane, biplane?
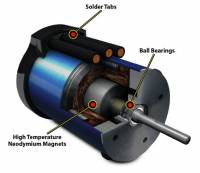
This is a brushless motor, we found out, that it is the most powerful motor on the market, up to 100.000 turns per Min, used in RC Cars. We think we need a micro inrunner because we want to make a small bird.
Minute:
- We got confirmation, that the engine we are looking for should be a brushless inrunner. For choosing the motor we have to decide on the measures of our bird and the flapping freaquency.
- We were suggested to add a safety weight factor (+25%)to make sure the project succeeds, if the bird will be slightly heavier.
- We got some names and addresses of hobby stores, that we are planning to visit as soon as possible, to see what's available on the local market.
7th Meeting (2014-04-10)
Agenda:
Interim presentation
8th Meeting (2014-04-30)
Agenda:
- When can we expect to get the materials?
- Do we have to add all the explaining calculations to the report? For example how we chose the engine?
- € and “dollars” are always mixed up because once we assume that we will aim to the Australian market and once we are positioned in germany. Can we use dollar in the marketing section and € in the rest of the report?
- Is it reasonable to run a 3,7 V brushless inrunner with only 1-1,5 V ? Or will it loose to much torque?
Minute:
- We got on an agreement, that it is not reasonable to buy an off-the-shelf product(stunt plane) and use only it's transceiver, because wings, body and the engine don't fit our needs.
- Instead, we were suggested to use an Arduino, and to make the robot without a remote control in the first stage.
- The main working princibles of an Arduino were introduced as well.

9th Meeting (2014-05-08)
Agenda:
- Can we use Arduino Pro Mini 328 as a microcontroller?
http://www.inmotion.pt/store/arduino-pro-mini-328-3.3v-8mhz
Minute:
- We got confirmation that the Arduino we chose, can be used. But as a problem, it's output current is only 150 mA.
- To provide the engine with enough current (around 1 A), we need to use a motor driver. Luckily a suitable one was chosen during the supervision and we could finally call our material list finished.
10th Meeting (2014-05-15)
Agenda:
- How to calculate the wing area for drag/lift force equation? In case of a biplane.
Minute:
- We were asked to make a list of tools, what we need to use in the workshop
- Got some hints and guidelines, what issues need more attention in our driving mechanism
11th Meeting (2014-05-22)
Agenda:
- List of necessary tools:
- heat gun
- soldering station
- multimeter
- various sandpapers
- cutter blade or a knife
- scissors
- glue
- transparent tape
- [file(s), hacksaw, drill, nippers/pincers etc ]
Minute:
- We found out that the workshop doesn't have tiny enough tools and everything has to be scaled up.
- An electric wiring diagram has to be made ASAP.
- We should be ready with our deliverables soon.
12th Meeting (2014-05-29)
Agenda:
- What is the difference(or what should they contain) between those subtopics?
- 1.6 Functional Tests
- 6.4 Functionalities
- 6.5 Tests and Results
- When does the video have to be ready ? How long should it approximately be ?
- the deadline for the video is the 12th, we don´t have any material yet so making the video will be non sense because it should mainly contain the development of the prototype
- Does the workshop have 2mm; 2,5mm; 3mm drill bits ?
- Is there a lathe ?
Minute:
- We got some information about the differences of “Functional tests”; “Funcinalities” and “Tests and results”
- Also that the workshop has a lathe and the necessary drill bits
- We found out that we should start buying the materials ourselves
13th Meeting (2014-06-05)
Agenda:
- What kind of materials or leftovers can be found in the workshop ? Aluminimum, plastic? Sheet material with different thicknesses ?
Minute:
- Gathered info of the materials available in the workshop, and got some example pieces as well.
14th Meeting (2014-06-12)
Agenda:
- Powershop in Maia was willing to help us with our materials, but now a week later they replied that it was impossible to order from hobbyking. So we are missing 2 components: battery and motor. Our idea was to use the battery and the engine from an existing product. Is it still possible? We would use the arduino and motor driver, and everything else would be done as previously planned.
Minute:
- Supervisors found us a battery and suggested to order an alternative engine from Inmotion.
15th Meeting (2014-06-19)
- Final presentation and assessment
Minute:
- Got feedback from all the supervisors and list of mistakes that have to be corrected for next Thursday.
Activities
| Start | End | Task | Description | Who |
|---|---|---|---|---|
| 27.02 | 28.02 | Choose a project | Talk about our skills and thinking of a project that would suit our skills | Team 3 |
| 28.02 | 03.03 | Get information about project | Doing research about existing electronic flying devices | Team 3 |
| 03.03 | 06.03 | Define the tasks | Brainstorming about what should be done and splitting up the tasks | Team 3 |
| 09.03. | 10.03 | Gantt chart | Downloading the program and uploading the Gantt chart in the wiki | Team 3 |
| 10.03 | 10.03 | Group meeting | Team 3 | |
| 11.03 | 14.03 | Research | Reading the documents of Manuel and outlining whats most important for us | Team 3 |
| 14.03 | 16.03 | Starting with the Marketing part | Research | Team 3 |
| 16.03 | 22.03 | Brainstorming | Deciding which type of animal we should choose | Team 3 |
| 20.03 | 25.03 | Reading | Studying “beginning arduino Programming”, “Arduino Internals”, “Learn Electronics with Arduino” | Team 3 |
| 22.03 | 25.03 | Research | Studying the components that we need for our DOVE | Team 3 |
| 22.03 | 22.03 | State of the arts | researching and listing all aspects of the state of the art | Team 3 |
| 23.03 | 25.03 | Preparing the material list | Searching for a bigger engine in electro component shops, looking for the other components that we would need for the remote controlled, bio-inspired robot | Team 3 |
| 25.03 | 25.03 | Sketches | Making sketches of the driving mechanism | Rauno |
| 26.03 | 26.03 | Material list | Upload the material list | Team 3 |
| 26.03 | 30.03 | Marketing Analysis | Working on the Marketing Analysis | Yvonne, Benedicte, Rauno |
| 26.03 | 03.04 | Sketches | Making representative sketches to visualize the intention | Benedicte |
| 29.03 | 29.03 | Logbook | Updating logbook | Yvonne |
| 31.03 | 31.03 | Marketing Analysis | uploading the Marketing Analysis | Benedicte, Yvonne |
| 02.04 | 02.04 | Gantt | making and uploading the Gantt Chart | Yvonne |
| 04.04 | 04.04 | Ethics | Ethics section | Benedicte |
| 05.04 | 05.04 | Introduction | Writing the introduction | Benedicte, Yvonne |
| 05.04 | 05.04 | Design | making frontpage and leaflet in photoshop | Benedicte |
| 05.04 | 05.04 | Sustainability and eco-efficiency | researching and collection possibilities | Yvonne, Rauno |
| 06.04 | 06.04 | Report | Putting everything together in pdf, and upload | Benedicte |
| 07.04 | 09.04 | Interim Presentation | Making Interim Presentation | Team 3 |
| 16.04 | 06.04 | Aerodynamics | Meeting with Fernando | Iain, Rauno |
| 24.04 | 24.04 | Aerodynamics | Meeting with Fernando | Iain, Rauno |
| 29.04 | 29.04 | Project Development | Updating Project Development | Rauno |
| 29.04 | 13.05 | Project Management | Topics 1-4,6 | Yvonne |
| 29.04 | 13.05 | Project Management | Topics 5,8 | Rauno |
| 29.04 | 13.05 | Project Management | Topics 7,9,10 | Benedicte |
| 01.05 | 12.05 | Marketing | Marketing Mix and rest | Yvonne |
| 01.05 | 07.05 | 3D | Working on the driving mechanism | Yvonne |
| 07.05 | 07.05 | SW | Technical drawings | Yvonne |
| 08.05 | 08.05 | Material List | Last version uploaded | Team 3 |
| 08.05 | 20.05 | Sustainability | Sustainability section | Yvonne |
| 15.05 | 20.05 | Sustainability | Lifecycle analysis | Rauno |
| 20.05 | 20.05 | Project Management | Topics 7-9 | Team 3 |
| 21.05 | 21.05 | Ethics | Making the presentation | Yvonne |
| 22.05 | 22.05 | Ethics | Presentation | Team 3 |
| 22.05 | 22.05 | Project Development | Shaping the foam body | Rauno, Yvonne |
| 23.05 | 23.05 | Aerodynamics | Meeting with Fernando to present our ideas | Rauno, Yvonne |
| 24.05 | 25.05 | 3D | Making the body in Solidworks | Yvonne |
| 27.05 | 27.05 | Communication | Feedback and comments from Ana | Benedicte, Yvonne |
| 28.05 | 28.05 | Materials | Visiting the Aerokit store in Espinho | Rauno, Iain |
| 30.05 | 31.05 | Project Development | Improvements | Rauno |
| 31.05 | 31.05 | Project Management | Finishing the section and sending to lecturer | Yvonne |
| 02.06 | 02.06 | Project Development | Electrical drawings | Iain |
| 03.06 | 03.06 | Project Management | Making the presentation | Yvonne |
| 02.06 | 12.06 | Materials | Negotiations with “middleman” to order our materials | Rauno, Iain |
| 11.06 | 11.06 | Gantt | Making the Gantt Chart | Yvonne |
| 12.06 | 12.06 | Project Management | making the presentation | Yvonne |
| Report | Abstract | Iain | ||
| Report | Paper | Iain | ||
| 09.06 | 10.06 | Poster | Designing the poster | Benedicte |
| 09.06 | 14.06 | Report | Formatting final report | Benedicte |
| 10.06 | 14.06 | Report | Correcting the language | Iain |
| 12.06 | 12.06 | Report | Finished Project development | Rauno |
| 01.06 | 07.06 | 3D | Renewing the driving mechanism in SW | Yvonne |
| 05.06 | 07.06 | 3D | Making the shell in SW | Benedicte |
| 15.06 | 16.06 | Materials | Collecting the materials from Manuel and from shops | Rauno |
| 17.06 | 18.06 | Final Presentation | Making the Final Presentation | Yvonne |
| 17.06 | 18.06 | Video | Making the video | Yvonne |
| 17.06 | 25.06 | Prototype | Building the prototype | Team 3 |
| 21.06 | 26.06 | Final Report | Correcting final report | Benedicte, Yvonne |